本文最后更新于 2026年1月16日 上午
赵老师开源的 Github 仓库、赵老师的 B站 课程视频
Overview
通过网格世界示例,我们展示了以下关键概念:
- 状态
- 动作
- 状态转移、状态转移概率 p(s′∣s,a)
- 奖励、奖励概率 p(r∣s,a)
- 轨迹、回合、回报、折扣回报
- 马尔可夫决策过程
Lecture 1: State, Action, Policy
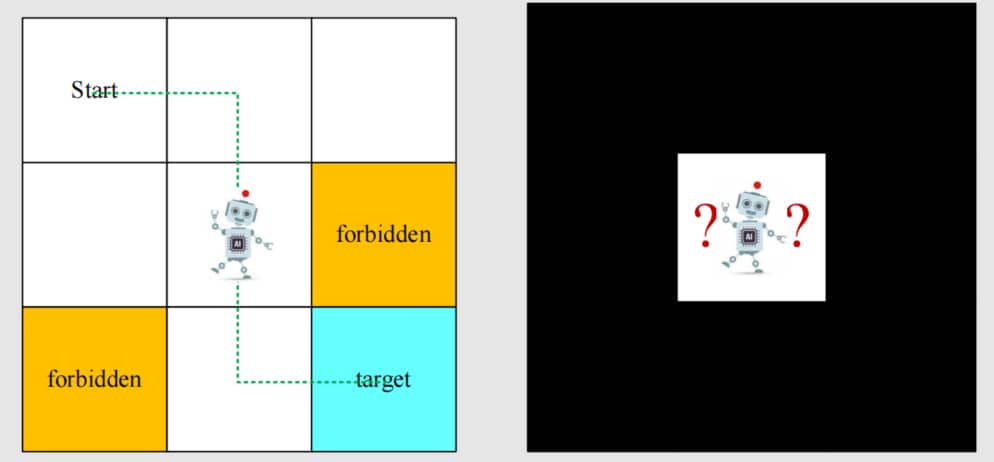 Grid-World Example
Grid-World Example
课程中贯穿始终的案例:
- 单元格网格:accessible / forbidden / target cells / boundary
- 非常容易理解且对说明很有用
任务:
- 给定任何起始区域,找到一条通往目标的“好”路径。
- 如何定义“好”?尽可能避开禁止单元格、绕路或超越边界。
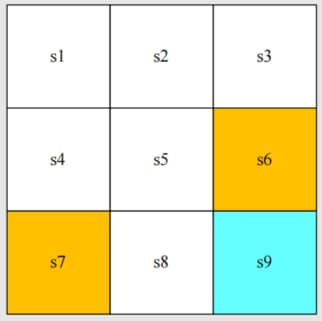
1.1 State
状态 (state) : agent 相对于环境的状态 (status)
- 对于 grid-world example,智能体的位置就是其状态。有九个可能的位置,因此有九个状态:s1,s2,…,s9。
 State
State
状态空间 (state space) : 所有状态的集合 S={si}i=19。
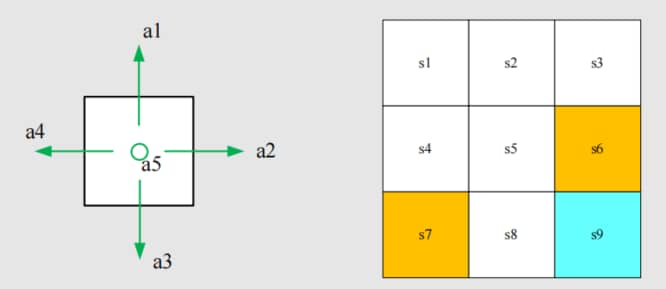
1.2 Action
动作 (action) : 对于每个状态,有五个可能的动作:a1,…,a5
- a1:向上移动;
- a2:向右移动;
- a3:向下移动;
- a4:向左移动;
- a5:保持不变;
 State
State
动作空间 (action space of a state) : 一个状态的所有可能动作的集合。A(si)={ai}i=15。
Remark: 可以看到,动作空间是依赖于状态的。
1.3 State Transition
沿用上面的例子
当执行一个 action 时,agent 可能从一个状态转移到另一个状态。这样的过程称为 状态转移 (state transition)
Q:我们可以用其他方式定义状态转移吗?可以。
1.3.1 Forbidden Area
Forbidden area: 在状态 s5,如果我们选择动作 a2,那么下一个状态是什么?
我们考虑第一种情况,它更具一般性,也更困难。
1.3.2 Tabular Representation
我们可以用表格来描述状态转移:
|
a1 (upwards) |
a2 (rightwards) |
a3 (downwards) |
a4 (leftwards) |
a5 (unchanged) |
| s1 |
s1 |
s2 |
s4 |
s1 |
s1 |
| s2 |
s2 |
s3 |
s5 |
s1 |
s2 |
| s3 |
s3 |
s3 |
s6 |
s2 |
s3 |
| s4 |
s1 |
s5 |
s7 |
s4 |
s4 |
| s5 |
s2 |
s6 |
s8 |
s4 |
s5 |
| s6 |
s3 |
s6 |
s9 |
s5 |
s6 |
| s7 |
s4 |
s8 |
s7 |
s7 |
s7 |
| s8 |
s5 |
s9 |
s8 |
s7 |
s8 |
| s9 |
s6 |
s9 |
s9 |
s8 |
s9 |
但这仅能表示确定性情况。
1.3.3 State Transition Probability
状态转移概率 (state transition probability) : 用概率来描述状态转移!
- 直觉:在状态 s1,如果我们选择动作 a2,下一个状态是 s2。
- 数学表达:
p(s2∣s1,a2)p(si∣s1,a2)=1=0∀i=2
这是确定性情况。状态转移也可以是随机性的。
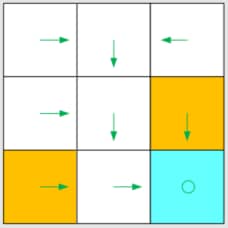
1.3 Policy
策略 (Policy) : 告诉 agent 在某个状态下采取什么动作。
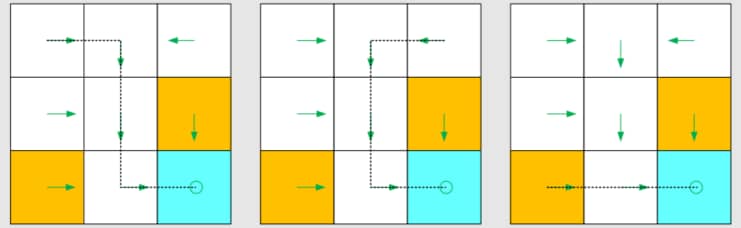
直观表示:箭头展示了一个策略。
 Policy
Policy
基于这个策略,我们可以得到不同起始点的如下路径 (path)
 Path / Trajectory
Path / Trajectory
数学化的表达方式:使用条件概率。
例如,对于状态 s1:
- π(a1∣s1)=0
- π(a2∣s1)=1
- π(a3∣s1)=0
- π(a4∣s1)=0
- π(a5∣s1)=0
这是一个确定性策略。
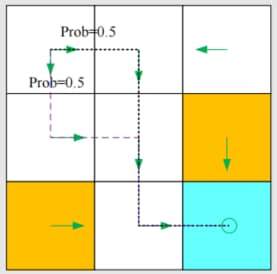 不确定情况下的策略
不确定情况下的策略
在这个策略中,对于 s1:
- π(a1∣s1)=0
- π(a2∣s1)=0.5
- π(a3∣s1)=0.5
- π(a4∣s1)=0
- π(a5∣s1)=0
这是一个随机性策略。
策略的表格表示:
|
a1 (upwards) |
a2 (rightwards) |
a3 (downwards) |
a4 (leftwards) |
a5 (unchanged) |
| s1 |
0 |
0.5 |
0.5 |
0 |
0 |
| s2 |
0 |
0 |
1 |
0 |
0 |
| s3 |
0 |
0 |
0 |
1 |
0 |
| s4 |
0 |
1 |
0 |
0 |
0 |
| s5 |
0 |
0 |
1 |
0 |
0 |
| s6 |
0 |
0 |
1 |
0 |
0 |
| s7 |
0 |
1 |
0 |
0 |
0 |
| s8 |
0 |
1 |
0 |
0 |
0 |
| s9 |
0 |
0 |
0 |
0 |
1 |
可表示确定性或随机性情况。
Lecture 2: Reward, Return, Markov Decision Process
2.1 Reward
奖励 (reward) : agent 在执行动作后获得的实数。
奖励是强化学习(RL)最独特的概念之一。
- 正奖励 (positive) 表示对采取此类动作的鼓励 (encourage)
- 负奖励 (negative) 表示对采取此类动作的惩罚 (punishment)
问题:
- 零奖励算是什么?无惩罚(一定程度上算是鼓励)
- 正奖励可以表示惩罚吗?可以。
2.1.1 网格世界示例中的奖励设计
在网格世界示例中,奖励设计如下:
- 如果智能体试图越界,令 rbound=−1
- 如果智能体试图进入禁止单元格,令 rforbid=−1
- 如果智能体到达目标单元格,令 rtarget=+1
- 否则,智能体获得奖励 r=0。
奖励可被理解为 人机接口 (human-machine interface),通过它我们可以引导智能体表现出我们期望的行为。
例如,通过上述设计的奖励,智能体将尝试避免越界或踏入禁止单元格。
|
a1 (upwards) |
a2 (rightwards) |
a3 (downwards) |
a4 (leftwards) |
a5 (unchanged) |
| s1 |
rbound |
0 |
0 |
rbound |
0 |
| s2 |
rbound |
0 |
0 |
0 |
0 |
| s3 |
rbound |
rbound |
rforbid |
0 |
0 |
| s4 |
0 |
0 |
rforbid |
rbound |
0 |
| s5 |
0 |
rforbid |
0 |
0 |
0 |
| s6 |
0 |
rbound |
rtarget |
0 |
rforbid |
| s7 |
0 |
0 |
rbound |
rbound |
rforbid |
| s8 |
0 |
rtarget |
rbound |
rforbid |
0 |
| s9 |
rforbid |
rbound |
rbound |
0 |
rtarget |
(上述表格仅能表示确定性情况。)
2.1.2 数学描述:条件概率
- 直觉:在状态 s1,如果我们选择动作 a1,奖励是 -1。
- 数学表达:p(r=−1∣s1,a1)=1 且 p(r=−1∣s1,a1)=0
Remark:
- 这里是确定性情况。奖励转移也可以是随机性的。
- 例如,如果你努力学习,你会获得奖励,但具体多少是不确定的。
- 奖励依赖于状态和动作,而非下一状态(例如,考虑 s1,a1 和 s1,a5)。
2.2 Trajectory and Return
轨迹 (trajectory) 是 状态-动作-奖励链 (state-action-reward chain):
s1r=0⟶a2s2r=0⟶a3s5r=0⟶a3s8r=1⟶a2s9
该轨迹的 回报 (return) 是沿轨迹收集的所有奖励 (reward) 之和:
return=0+0+0+1=1
Remark: return 是针对轨迹来定义的。
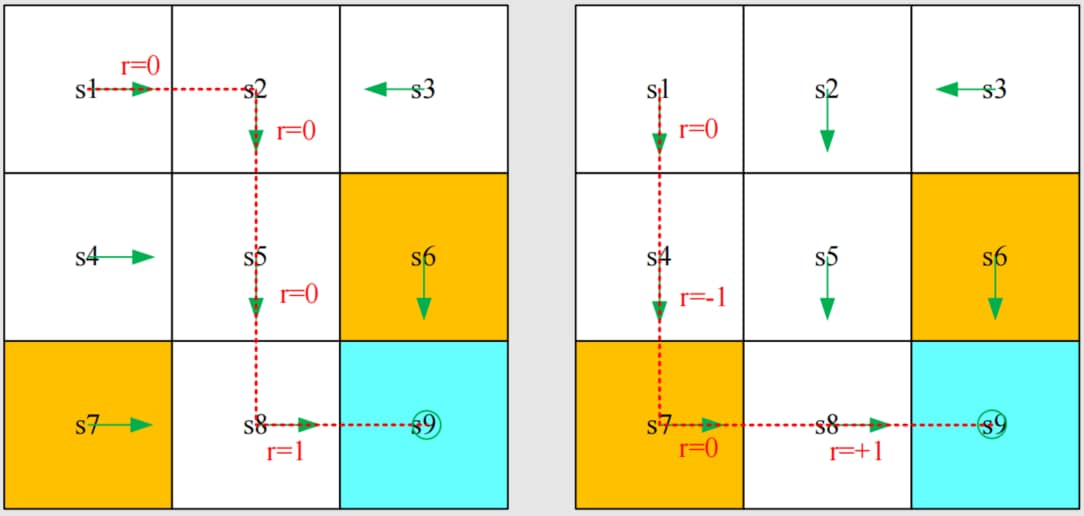 不同 trajectory 的 return
不同 trajectory 的 return
不同的策略产生不同的轨迹
s1r=0⟶a3s4r=−1⟶a3s7r=0⟶a2s8r=+1⟶a2s9
该路径的回报是:
return=0−1+0+1=0
哪种策略更好?
- 直觉:第一种更好,因为它避开了禁止区域。
- 数学角度:第一种更好,因为它的 return 更大!
- return 可用于评估一个策略是否良好。
2.2.1 Discounted Return
轨迹可能是无限的:
s1⟶a2s2⟶a3s5⟶a3s8⟶a2s9⟶a5s9⟶a5s9…
回报为
return=0+0+0+1+1+1+⋯=∞
由于回报发散,该定义无效!
如何解决?
需要引入 折扣因子 (discount rate) γ∈[0,1)
折扣回报 (Discounted Return):
discounted return=0+γ0+γ20+γ31+γ41+γ51+…=γ3(1+γ+γ2+…)=γ31−γ1.
作用:
- 求和变为有限;
- 平衡远期和近期未来的奖励:
- 若 γ 接近 0,折扣回报的值由近期获得的奖励主导。
- 若 γ 接近 1,折扣回报的值由远期获得的奖励主导。
2.3 Episode
遵循策略与环境交互时,智能体可能在某些终止状态 (terminal state) 停止,由此产生的轨迹称为 回合 (episode) 或 试验 (trial)。
s1r=0⟶a2s2r=0⟶a3s5r=0⟶a3s8r=1⟶a2s9
episode 通常被假设为有限轨迹,这种任务通常称为 回合制任务 (episodic tasks)。
有些任务可能没有终止状态,这意味着与环境的交互永远不会结束。此类任务称为 持续性任务 (continuing tasks)。
在网格世界示例中,到达目标后我们应该停止吗?
实际上,我们可以通过将幕式任务转换为持续任务,以统一的数学方式处理回合制任务和持续性任务。
- 选择1:将目标状态视为特殊的 吸收态 (absorbing state)。一旦智能体到达吸收状态,就永远不会离开,后续奖励 r=0。
- 选项2:将目标状态视为具有策略的正常状态。智能体仍可离开目标状态,且进入目标状态时获得 r=+1。
本课程中我们考虑选项2,这样我们就不需要将目标状态与其他状态区分开,可以将其视为正常状态。
2.4 Markov Decision Process (MDP)
- 集合:
- 状态:状态集合 S
- 动作:与状态 s∈S 相关联的动作集合 A(s)
- 奖励:奖励集合 R(s,a)
- 概率分布:
- 状态转移概率:在状态 s,采取动作 a,转移到状态 s′ 的概率是 p(s′∣s,a)
- 奖励概率:在状态 s,采取动作 a,获得奖励 r 的概率是 p(r∣s,a)
- 策略:在状态 s,选择动作 a 的概率是 π(a∣s)
- 马尔可夫性:无记忆性
p(st+1∣at,st,…,a0,s0)p(rt+1∣at,st,…,a0,s0)=p(st+1∣at,st),=p(rt+1∣at,st).
本讲介绍的所有概念都可以纳入 MDP 的框架中。
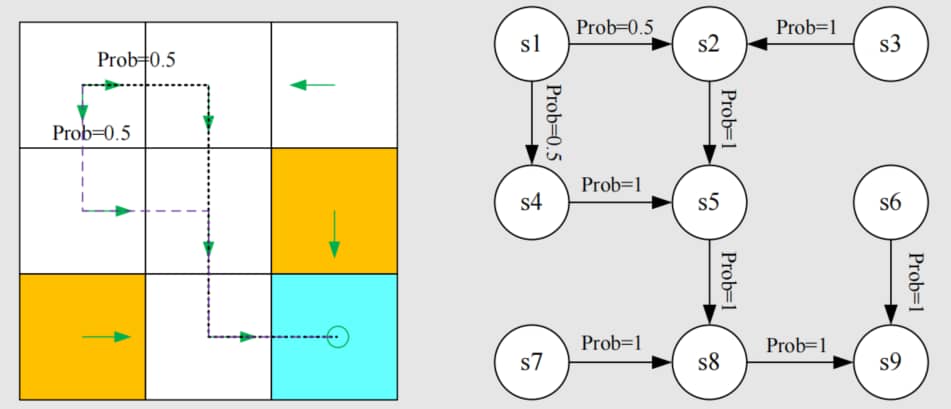 从 MDP 框架下再看网格世界例子
从 MDP 框架下再看网格世界例子
- 圆圈代表状态,带箭头的连线代表状态转移。
- 给定策略后,马尔可夫决策过程就成为马尔可夫过程!