本文最后更新于 2026年1月9日 晚上
2025/07/30 - 至今
待完善
主要参考资料
本篇文章主要基于《Score-board Generative Modeling Through Stochastic Differential Equations》Yang Song以及以下几个视频、博文。
相关数学推导主要来自:B站讲解 Nik_Li - 一个视频看懂如何从SDE视角看生成模型、苏剑林-科学空间-一般框架之SDE篇
PPT截图、整体脉络主要来自:Yang Song的讲座 B站 -【斯坦福大学Yang Song-当随机微分方程SDE遇上生成扩散模型】 和 blog
概述
 用SDEs架构对score-based model建模
用SDEs架构对score-based model建模
- 已知:独立同分布样本 {x1, x2, ⋯,xn}∼pdata(x)
- 模型:Time-dependent score-based model
sθ(x,t)≈∇xlogpt(x)
- 损失:Training
Et∈U(0,T)[λ(t)Ept(x)[∥∇xlogpt(x)−sθ(x,t)∥22]]
- 生成:Reverse-time SDE
dx=[f(x,t)−g2(t)sθ(x,t)]dt+g(t)dwˉ
- 求解器:Euler-Maruyama (analogous to Euler for ODEs)
xt←x−σ(t)2sθ(x,t)Δt+σ(t)z(z∼N(0,∣Δt∣I))←t+Δt
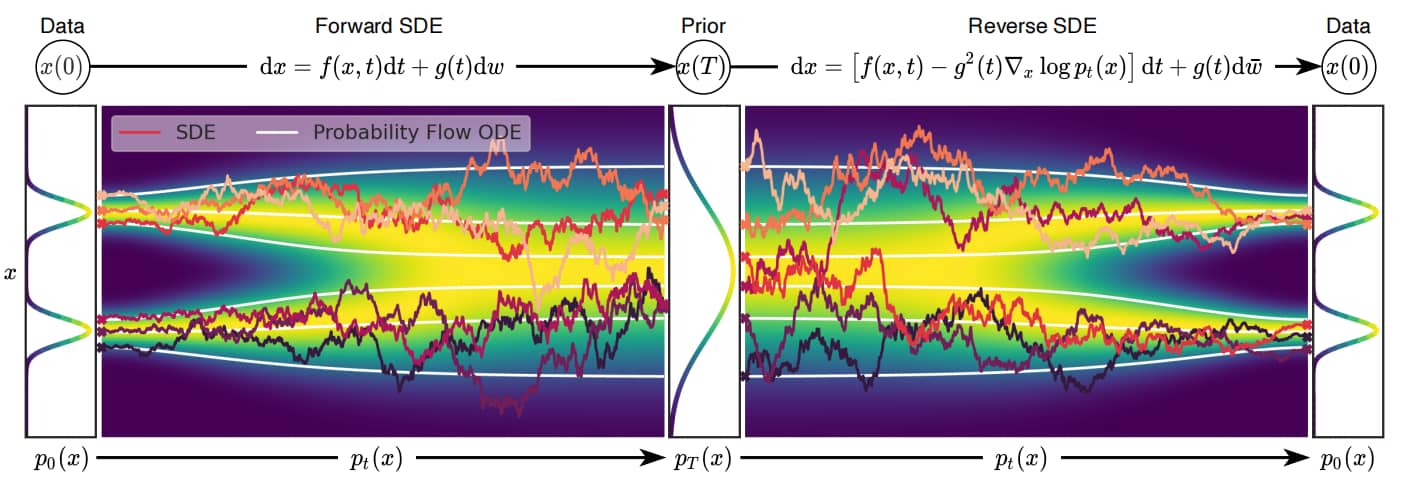 基于分数的SDE生成建模示意图。我们可以通过 SDE 将 data 映射到noise distribution(prior distribution),并通过逆向 SDE 实现生成建模。同时也可以逆向求解关联概率流ODE,这将产生一个确定性过程,其采样结果与SDE具有相同分布。无论是逆向时间随机微分方程还是概率流ODE,都可以通过估计score function 来获得
基于分数的SDE生成建模示意图。我们可以通过 SDE 将 data 映射到noise distribution(prior distribution),并通过逆向 SDE 实现生成建模。同时也可以逆向求解关联概率流ODE,这将产生一个确定性过程,其采样结果与SDE具有相同分布。无论是逆向时间随机微分方程还是概率流ODE,都可以通过估计score function 来获得
知识准备
Wiener过程(布朗运动):
W(t)∼N(0,t)
Wiener过程的增量具有正态性,因此有差分方程:
W(t+Δt)−W(t)∼N(0,Δt),Δt→0
取极限,得到微分方程:
dW=dtZ,Z∼N(0,1)
假设经扩散过程,data distribution → prior distribution(p)。有伊藤过程(扩散过程)前向过程的SDE:
dx=f(x,t)dt+g(t)dW
其中
- x:状态变量
- f:漂移系数,用于控制随机过程的确定性质。
- g(t):扩散系数
- W(t):Wiener过程
已知 f,g,p,有逆向过程的SDE:
dx=[f(xt,t)−g2(t)∇xlogp(x)]dt+g(t)dw
- ∇xlogp(x) 即为 score function,用神经网络逼近之。
主干部分
Yang Song 本篇论文的主要贡献在于,其提出了一种SDE框架,并在此框架下统一了 DDPM(Denoising Diffusion Probabilistic Models)与 SMLD(Score Matching with Langevin Dynamics)这两种生成模型。
动机
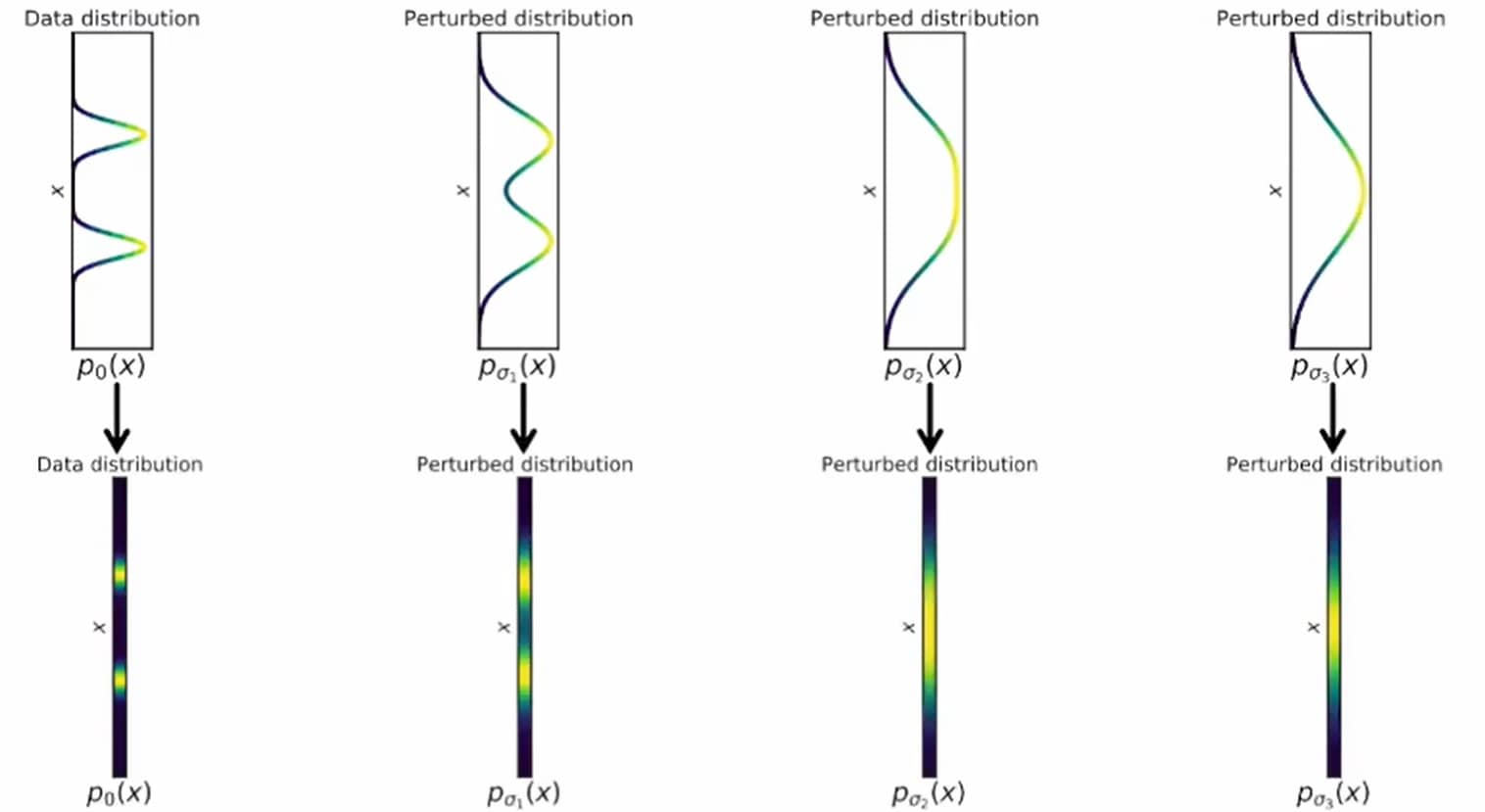
问题:NCSN使用的是有限噪声,在NCSN的框架上,如何引入无限噪声水平?如何将之前的离散过程连续化?
在此情况下,噪声扰动过程是一个连续时间随机过程,如下图所示。
 通过连续时间随机过程将数据扰动至纯噪声
通过连续时间随机过程将数据扰动至纯噪声
正向SDE的建立
问题:如何简洁地表示一个随机过程?
许多随机过程(尤其是扩散过程)是随机微分方程(SDEs)的解。一般来说,SDE具有如下形式:
dx=f(x,t)dt+g(t)dw(1)
其中
- f(⋅,t):Rd→Rd 是称为漂移系数 (drift coefficient) 的向量值函数,
- g(t)∈R 是称为扩散系数 (diffusion coefficient) 的实值函数,
- w 表示标准Wiener过程,dw 可视为无穷小的白噪声。
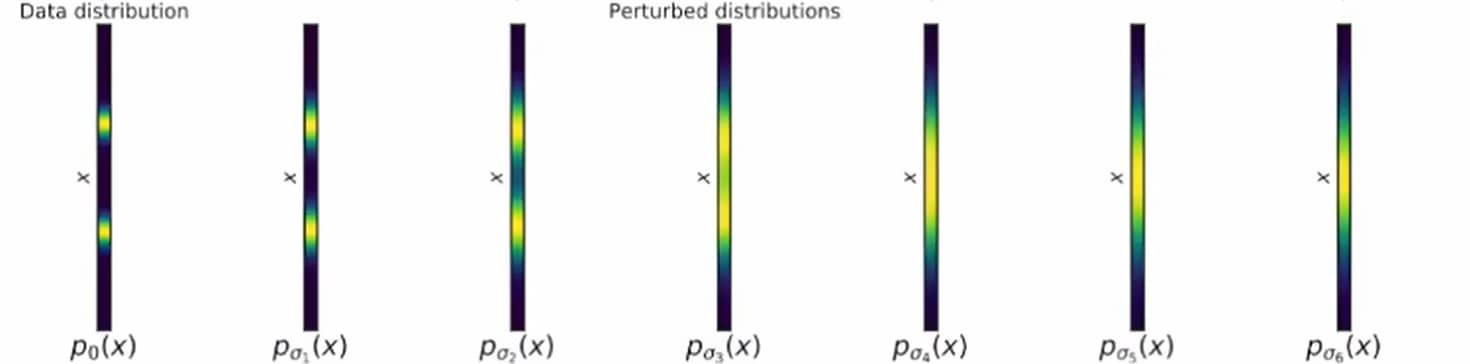
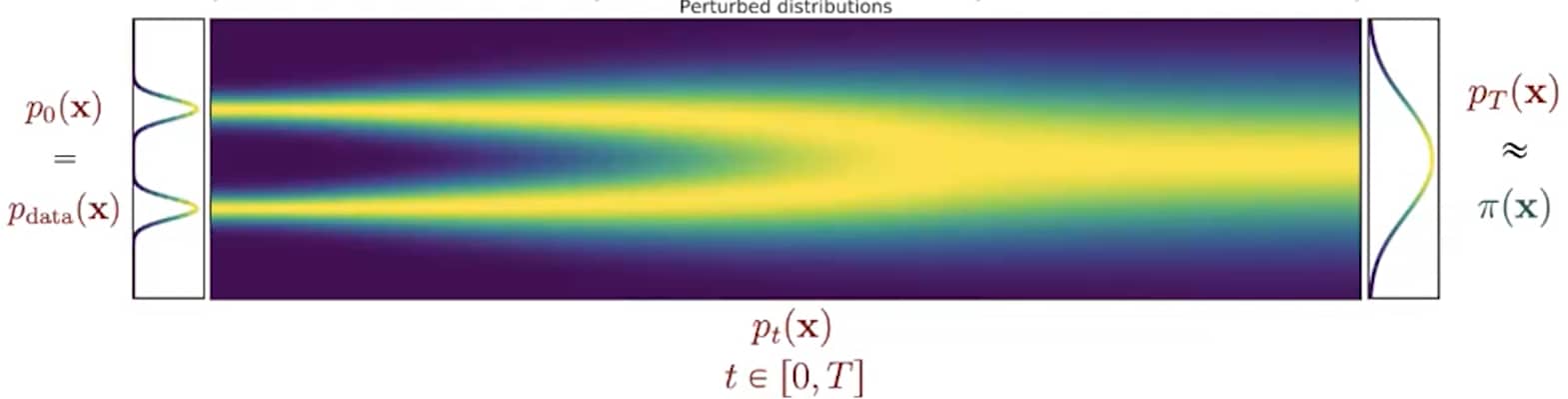
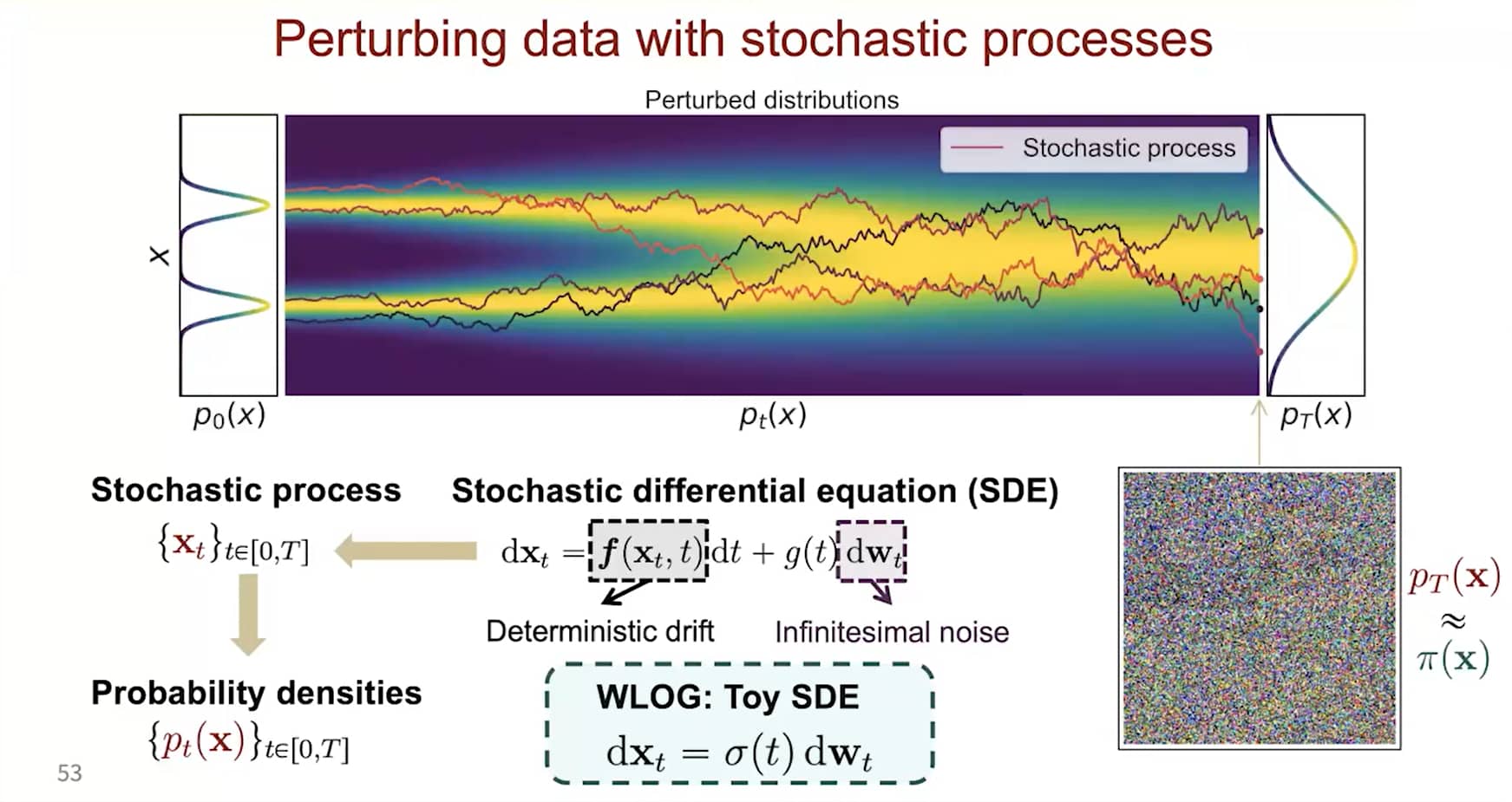 用随机过程做扰动
用随机过程做扰动
SDE 的解是随机变量的连续集合 {x(t)}t∈[0,T]。随着时间指标 t 从起始时间 0 增长到结束时间 T,这些随机变量会描绘出 随机轨迹。
令 pt(x) 表示 x(t) 的边缘概率密度函数。p0(x)=p(x) 是数据分布,pT(x) 会趋近于一个易处理的噪声分布 π(x),称为先验分布。
式 <a href="#eq:1" class="equation-ref">(1)</a> 中的 SDE 是人工设计的,类似于在有限噪声尺度时人工设计 σ1<σ2<⋯<σL 这样。添加噪声扰动的方法众多,SDE 的选择也不唯一。例如,以下 SDE:
dx=etdw
用 均值为零、方差指数增长 的高斯噪声扰动数据——这类似于当 σ1<σ2<⋯<σL 构成等比数列时,用 N(0,σ12I)、N(0,σ22I)、⋯、N(0,σL2I) 扰动数据的过程。
因此,SDE 应被视为模型的一部分,就像 {σ1,σ2,⋯,σL} 一样。我们提供了三种对图像普遍有效的 SDE:方差爆炸 SDE(VE SDE)、方差保持 SDE(VP SDE) 和 sub-VP SDE。
反转SDE以采样
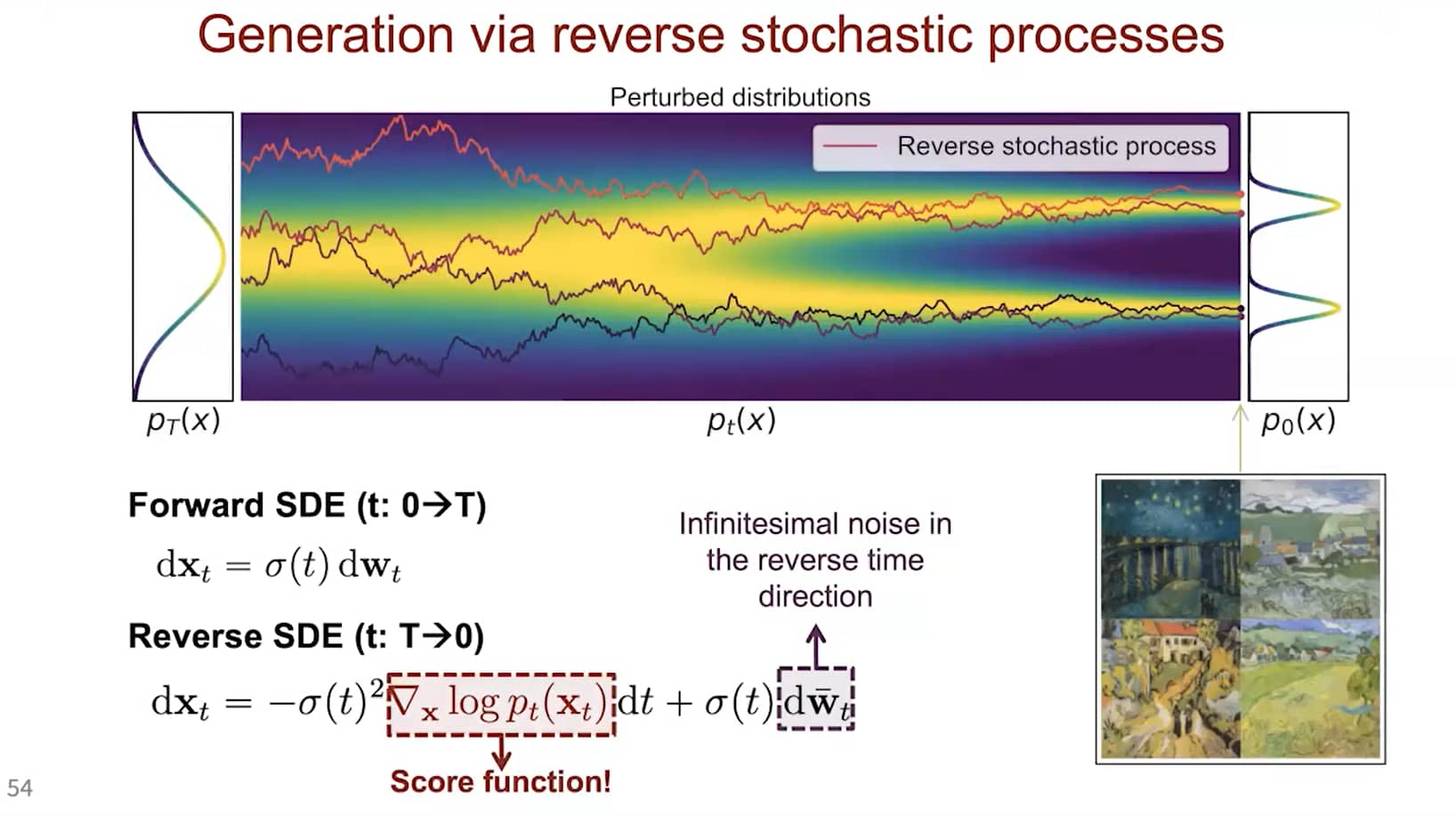
在有限噪声尺度下,我们可通过 退火朗之万动力学(annealed Langevin dynamics)反转扰动过程来生成样本——即利用朗之万动力学,依次从每个噪声扰动的分布中采样。对于无限噪声尺度,我们可类似地通过 反转SDE(reverse SDE)反转扰动过程,实现样本生成。
 通过反转扰动过程从噪声中生成样本
通过反转扰动过程从噪声中生成样本
式 <a href="#eq:1" class="equation-ref">(1)</a> 中的 SDE 存在其对应的 反向SDE,其闭式解由文献 <sup><a href="#ref1">[1]</a></sup> 给出:
dx=[f(x,t)−g2(t)∇xlogpt(x)]dt+g(t)dw(2)
此处的 dt 表示 负无穷小时间步(因为逆SDE 需要 反向时间求解,即从 t=T 到 t=0)。为计算上述反向SDE,需估计 ∇xlogpt(x)——这恰是 pt(x) 的 得分函数 (score function)。
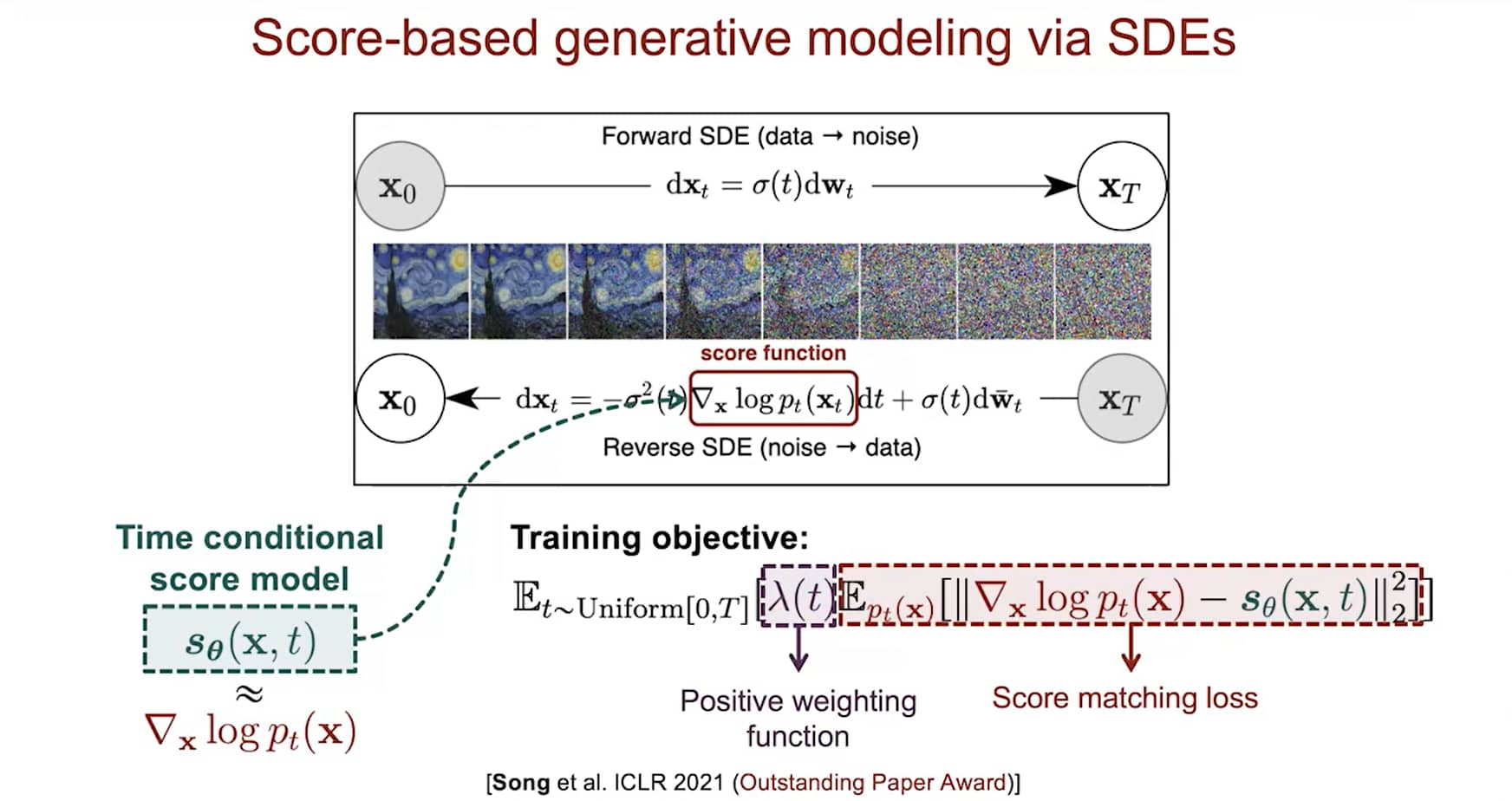
 用反向随机过程做生成
用反向随机过程做生成
基于得分的模型与得分匹配估计逆SDE
求解逆SDE需要已知 (terminal distribution) 末端分布 pT(x) 和 得分函数 ∇xlogpt(x)。根据设计,前者接近完全可处理的 先验分布 π(x),只需考虑后者。
为估计 ∇xlogpt(x),我们训练 (Time-Dependent Score-Based Model) 时间依赖的得分模型 sθ(x,t),使得 sθ(x,t)≈∇xlogpt(x)。这类似于有限噪声尺度下的 噪声条件得分模型 sθ(x,i)(训练目标为 sθ(x,i)≈∇xlogpσi(x))。
sθ(x,t) 的训练目标是 Fisher散度的连续加权组合,形式为:
Et∼U(0,T){Ept(x)[λ(t)∥∇xlogpt(x)−sθ(x,t)∥22]}(3)
其中:
- U(0,T) 表示时间区间 [0,T] 上的均匀分布;
- λ:R→R>0 是正权重函数。
通常,我们选择 λ(t)∝1/E[∥∇x(t)logp(x(t)∣x(0))∥22],以平衡不同时间步的得分匹配损失幅度。
与之前类似,Fisher散度的加权组合可通过 得分匹配方法(如去噪得分匹配、切片得分匹配)高效优化。当得分模型 sθ(x,t) 训练至最优后,将其代入 反向SDE 式 <a href="#eq:2" class="equation-ref">(2)</a> 中,即可得估计的反向SDE:
dx=[f(x,t)−g2(t)sθ(x,t)]dt+g(t)dw.
我们可从 x(T)∼π 出发,求解上述 反向SDE 以得到样本 x(0)。记通过该方式得到的 x(0) 的分布为 pθ。当得分模型 sθ(x,t) 训练良好时,pθ≈p0,此时 x(0) 是数据分布 p0 的近似样本。
如何求解反向SDE
通过数值SDE求解器求解估计的逆SDE,我们可以模拟逆向随机过程以生成样本。最简单的数值SDE求解器或许是 欧拉-丸山法(Euler-Maruyama method)。将其应用于估计逆SDE时,它会通过有限时间步长和小高斯噪声对SDE进行离散化。具体来说,它会选择一个小的负时间步长 Δt≈0,初始化 t←T,并迭代以下过程直至 t≈0:
Δxxt←[f(x,t)−g2(t)sθ(x,t)]Δt+g(t)∣Δt∣zt←x+Δx←t+Δt,
其中 zt∼N(0,I)。
除欧拉-丸山法外,其他数值SDE求解器也可直接用于求解逆SDE以生成样本,例如 米尔斯坦法(Milstein method)和 随机龙格-库塔法(stochastic Runge-Kutta methods)。在本文中,作者还提出了一种类似欧拉-丸山法的逆向扩散求解器,但更适配反向时间SDE的求解。
此外,我们的反向SDE具有两个特殊性质,支持更灵活的采样方法:
- 我们通过时间依赖的得分模型 sθ(x,t),得到了 ∇xlogpt(x) 的估计。
- 我们仅关心从每个边缘分布 pt(x) 中采样。不同时间步的样本可具有任意相关性,无需形成逆SDE的特定轨迹。
基于这两个性质,我们可应用 MCMC方法 对数值SDE求解器得到的轨迹进行微调。具体来说,我们提出 预测-校正采样器(Predictor-Corrector samplers):
- 预测器(Predictor):可为任意数值SDE求解器,用于从现有样本 x(t)∼pt(x) 预测 x(t+Δt)∼pt+Δt(x)。
- 校正器(Corrector):可为任意仅依赖得分函数的MCMC过程,例如 Langevin dynamics 或 Hamiltonian Monte Carlo。
在预测-校正采样器的每一步:
- 首先用预测器选择合适的负步长 Δt<0,并基于当前样本 x(t) 预测 x(t+Δt);
- 然后运行若干校正步骤,根据得分模型 sθ(x,t+Δt) 改进 x(t+Δt),使其成为 pt+Δt(x) 的更高质量样本。
结合预测-校正方法与更优的得分模型架构,我们可在CIFAR-10数据集上实现当前最优的样本质量(通过FID和Inception分数衡量),超越了目前最先进的GAN模型(StyleGAN2 + ADA)。
概率流ODE(Probability Flow ODE)
尽管基于朗之万MCMC和SDE求解器的采样器能生成高质量样本,但它们无法为基于得分的生成模型计算 精确对数似然。接下来,我们介绍一种基于 常微分方程(ODE) 的采样器,它支持精确似然计算。
在文献中,我们证明:任意SDE都可转换为不改变其边缘分布 {pt(x)}t∈[0,T] 的ODE。因此,通过求解该ODE,我们能从与逆SDE相同的分布中采样。SDE对应的ODE称为 概率流ODE,形式为[[21]]:
dx=[f(x,t)−21g2(t)∇xlogpt(x)]dt.(14)
下图展示了SDE和概率流ODE的轨迹。尽管ODE轨迹比SDE轨迹 明显更平滑,但它们会将相同的数据分布转换为相同的先验分布(反之亦然),共享同一组边缘分布 {pt(x)}t∈[0,T]。换言之,求解概率流ODE得到的轨迹,与SDE轨迹具有 相同的边缘分布。
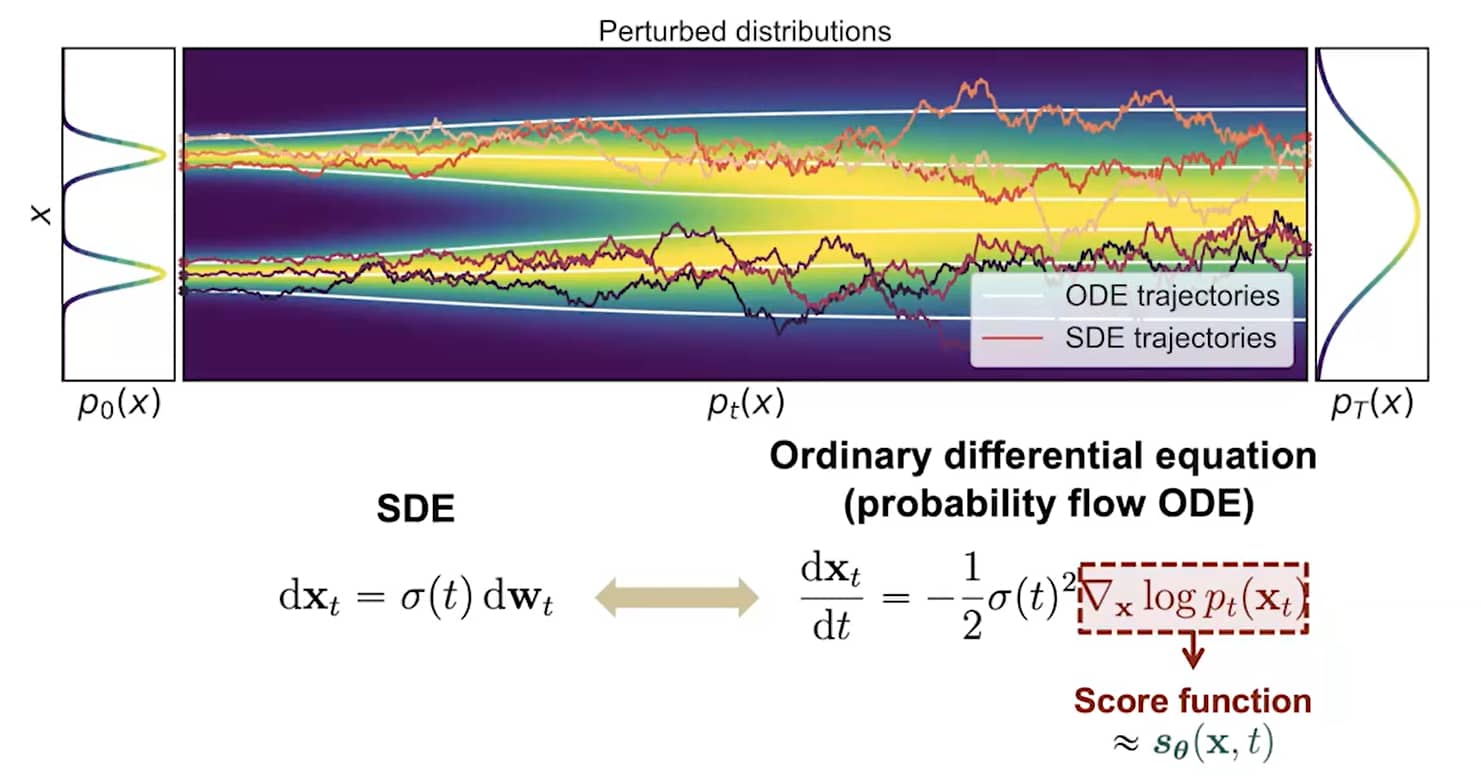 SDE转化为ODE
SDE转化为ODE
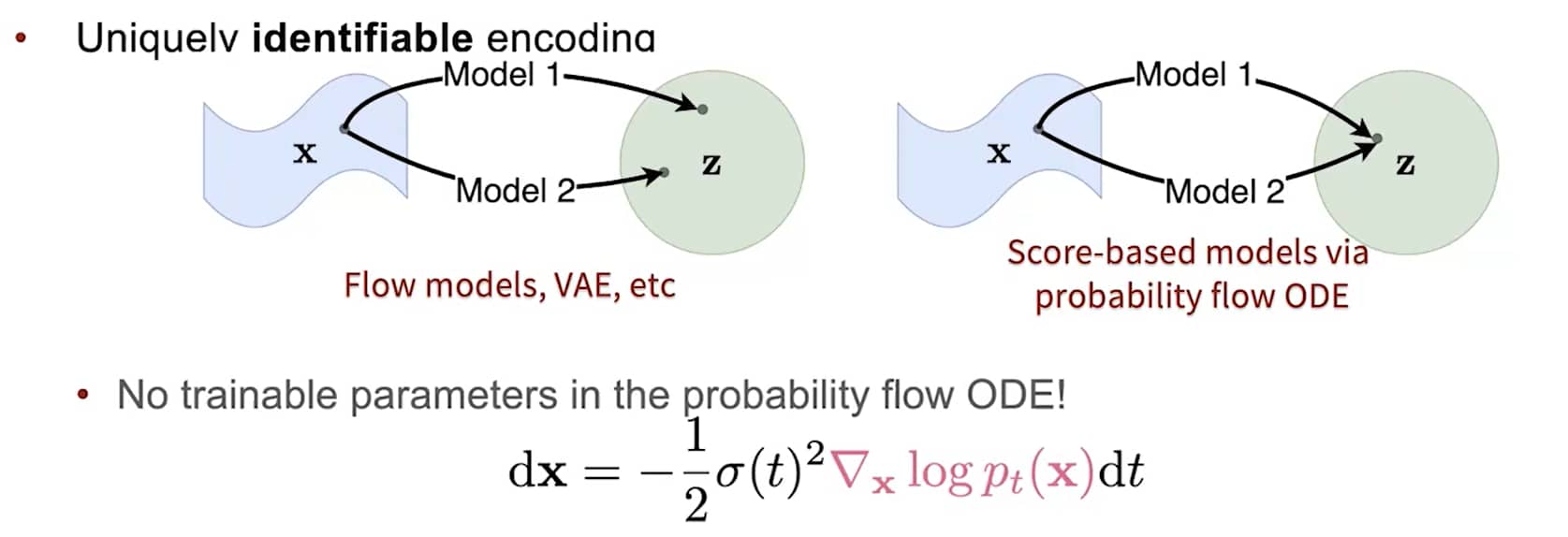 概率流ODE具有唯一可识别编码的特性(uniquely identifible encoding)
概率流ODE具有唯一可识别编码的特性(uniquely identifible encoding)
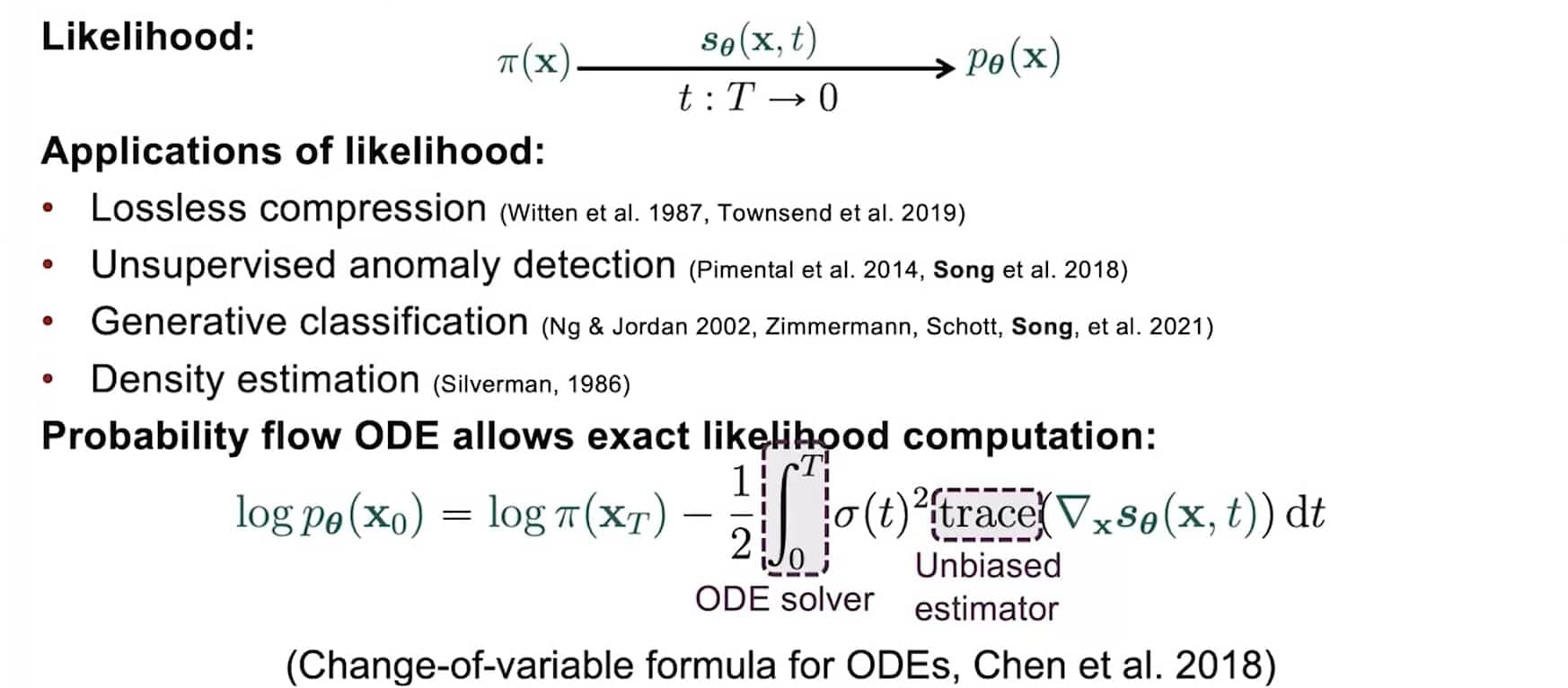 使用ODE计算精确似然
使用ODE计算精确似然
概率流ODE的独特优势
概率流ODE的公式化表达具有若干独特优势:
当 ∇xlogpt(x) 被其近似 sθ(x,t) 替代时,概率流ODE成为 神经ODE(neural ODE) 的特例。具体而言,它是 连续归一化流(continuous normalizing flows) 的示例——因为概率流ODE会将数据分布 p0(x)[[40]][[41]] 转换为先验噪声分布 pT(x)(由于与SDE共享相同边缘分布),且 完全可逆。
因此,概率流ODE继承了神经ODE或连续归一化流的所有性质,包括 精确对数似然计算。具体来说,我们可利用 瞬时变量变换公式(文献 [[21]] 中的定理1、相关文献中的公式(4)),通过数值ODE求解器,从已知的先验密度 pT 计算未知的数据密度 p0。
实际上,我们的模型在 均匀去量化的CIFAR-10图像 上实现了 当前最优的对数似然——甚至无需最大化似然训练。
当使用前文讨论的 似然加权(likelihood weighting) 训练基于得分的模型,并通过 变分去量化(variational dequantization) 计算离散图像的似然时,我们的模型可实现与“当前最优自回归模型” 相当甚至更优的似然(且无需任何数据增强)。
这是一段需要引用文献的内容 <sup><a href="#ref1">1</a></sup>,
另一段引用<sup><a href="#ref2">2</a></sup>。
参考文献
-
[1] Reverse-time diffusion equation models
B.D. Anderson. Stochastic Processes and their Applications, Vol 12(3), pp. 313--326. Elsevier. 1982.
-
[2] 霍金 S. 时间简史[M]. bantam, 2005.
待修改。