本文最后更新于 2025年8月2日 上午
守恒律 = 动量守恒 + 能量守恒 + 质量守恒
动量守恒
基本假设
弦振动模型(18世纪由达朗贝尔等人首先系统研究):给定一根两端固定的拉紧的均匀柔软的弦,其长度为L,在外力作用下在平衡位置附近作微小的横振动,求在不同时刻弦线的形状。
理想化假设:
- 弦是均匀的,弦的截面直径与弦的长度相比可以忽略,因此弦可以视为 一根曲线,它的线密度 ρ 是常数。
- 弦在某一平面内做微小振动,即弦的位置始终在一直线段附近,而弦上各点均在同一平面内垂直于该直线的方向上作微小振动。
- 弦是柔软的,它在形变时不抵抗弯曲,弦上各质点间的张力方向与弦的切线方向一致,且弦的伸长形变与张力的关系服从Hooke定律(即弦在各点的伸长形变与该点的张力成正比)。
冲量:冲量是力对时间的积累效应,即力对时间的积分。
动量:物体的质量和速度的乘积。
牛顿第二定律: 作用在物体上的力 = 物体的质量 × 物体的加速度
动量守恒定律: 外力产生的冲量(t1≤t≤t2) = 动量的变化(t2时刻动量−t1时刻动量)
弦振动方程的导出
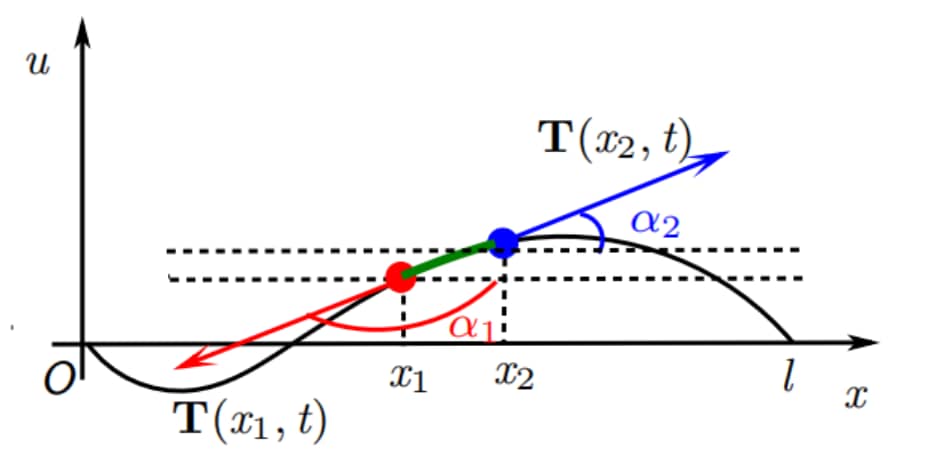
取弦的平衡位置为 x 轴,在弦线运动的平面内,垂直于弦线平衡位置且通过弦线一个端点的直线为 u 轴。任意时刻 t,弦线上各点的位移可表示为:u=u(x,t)
 弦振动示意图
弦振动示意图
在弦上任意截取一段区间 [x1,x2],考虑其在时段 [t1,t2] 内的动量变化:
- 设 ρ 为弦的线密度,
- f0 为作用在弦线上、垂直于平衡位置的强迫外力密度(单位长度的外力)。
则任意时刻 t,线段 [x1,x2] 的动量为:
∫x1x2ρ∂t∂udx
时段 [t1,t2] 内,线段 [x1,x2] 的动量变化为末动量减初动量,即:
∫x1x2(ρ∂t∂u)t=t2dx−∫x1x2(ρ∂t∂u)t=t1dx
弦段 [x1,x2] 受到两类力:
- 外力 f0;
- 周围弦线通过端点作用于弦段 [x1,x2] 的张力。
f0的冲量
时段 [t1,t2] 内,外力 f0 对弦段 [x1,x2] 的冲量为:
∫t1t2∫x1x2f0dxdt
周围线通过端点作用于弦段 [x1,x2] 的张力
记
- 弦上 x 点在时刻 t 的张力为 T(x,t)
- α1:弦在 x1 处切线与 x 轴正方向的夹角;
- α2:弦在 x2 处切线与 x 轴正方向的夹角。
考虑弦段 [x1,x2] 的弧长 Δs,其精确表达式为:
Δs=∫x1x21+(∂x∂u)2dx
基于微小振动假设(∂x∂u 很小,其平方为高阶小量),弧长可近似为:
Δs≈∫x1x2dx=x2−x1=Δx
可以认为弦段在振动中无伸长。结合Hooke定律:张力 T(x,t) 与时间 t 无关,即 T(x,t)=T(x)。
弦振动示意图
记张力 T(x) 的大小为 T(x),分析其在 x(水平)和 u(垂直)方向的分力:
- 端点 x1 处,张力 T(x1) 的分力:
T(x1)cosα1(水平分量),T(x1)sinα1(垂直分量)
- 端点 x2 处,张力 T(x2) 的分力:
T(x2)cosα2(水平分量),T(x2)sinα2(垂直分量)
弦仅做垂直于 x 轴的横向振动,故水平方向合力必为零:
T(x1)cosα1+T(x2)cosα2=0
结合微小振动假设,近似有:
cosα1≈−1,cosα2≈1
代入水平合力方程,得 张力为常数:
T(x1)=T(x2)=T0
由于 π−α1,α2 都很小,可认为:
- x1 处:sinα1=sin(π−α1)≈tan(π−α1)=∂x∂u(x,t)x=x1
- x2 处:sinα2≈tanα2=∂x∂u(x,t)x=x2
张力在垂直方向(u 方向)的合力为:
T0sinα2−T0sinα1=T0(∂x∂u(x,t)x=x2−∂x∂u(x,t)x=x1)
垂直合力对时间的积分(冲量)为:
∫t1t2T0(∂x∂u(x,t)x=x2−∂x∂u(x,t)x=x1)dt
由动量守恒定律,
∫t1t2∫x1x2f0dxdt+∫t1t2T0(∂x∂u(x,t)x=x2−∂x∂u(x,t)x=x1)dt=∫x1x2(ρ∂t∂u)t=t2dx−∫x1x2(ρ∂t∂u)t=t1dx
移项,将差项展开为积分形式(此处假设函数性质足够好),
∫t1t2dt∫x1x2f0dx=∫x1x2[∫t1t2∂t∂(ρ∂t∂u)dt]dx−∫t1t2T0[∫x1x2∂x∂(∂x∂u)dx]dt
交换积分次序,合并之(此处假设函数性质足够好),
∫t1t2dt∫x1x2f0dx=∫t1t2dt∫x1x2[∂t∂(ρ∂t∂u)−∂x∂(T0∂x∂u)]dx
由于区间 [x1,x2] 和 [t1,t2] 是任意选取的,被积函数必须恒等,因此得到弦振动方程:
∂t∂(ρ∂t∂u)−∂x∂(T0∂x∂u)=f0(0<x<L,t>0)
若弦是均匀的(线密度 ρ 为常数),则方程可简化为非齐次弦振动方程:
∂t2∂2u−a2∂x2∂2u=f(0<x<L,t>0)
其中,
- 波速平方:a2=ρT0,a 是弦的波速
- 等效外力密度:f(x,t)=ρf0(x,t),
经典解:若函数 u(x,t) 具有方程所需的各阶连续偏导数,且代入后使方程恒成立,则称 u(x,t) 为该方程的 经典解。
方程描述了弦的位移 u(x,t) 满足的一般性运动规律,但仅靠方程无法唯一确定弦的运动——还需结合 初始条件(初始位移、初始速度)和 边界条件(端点约束)。
定解条件与定解问题
初始条件
弦的运动需结合 初始状态(初始位移、初始速度):
- 初始位移:t=0 时,弦上各点的位移分布。
u(x,0)=φ(x)
- 初始速度:t=0 时,弦上各点的速度分布,ut 表示 ∂t∂u。
ut(x,0)=ψ(x)
Dirichlet边界条件(第一类边界条件)
已知端点的 位移变化,数学形式为:
u(0,t)=g1(t),u(ℓ,t)=g2(t)(t≥0)
- 特殊情况:当 g1(t)=g2(t)=0 时,称弦线具有固定端。
Neumann边界条件(第二类边界条件)
已知端点所受 垂直方向的外力,数学形式为:
−T∂x∂ux=0=g1(t),T∂x∂ux=ℓ=g2(t)(t≥0)
- 特殊情况:当 g1(t)=g2(t)=0 时,称弦线具有自由端。
Robin边界条件(第三类边界条件)
一般形式为:
−T∂x∂ux=0+α1u(0,t)=g1(t),T∂x∂ux=ℓ+α2u(ℓ,t)=g2(t)(t≥0)
其中 α1,α2>0。
定解问题
定解问题:由 偏微分方程 与 定解条件(初始条件 + 边界条件)共同构成,用于唯一确定物理过程的解。
- 混合问题:偏微分方程+初始条件+边界条件
- 初值(Cauchy)问题:偏微分方程+初始条件,考虑无限区域:−∞<x<∞, t≥0
波动方程的推广
弦振动方程的适用范围远不止弦的横向振动,还可描述杆的纵振动(位移沿杆长方向)、声波传播、电磁波传播等;因此,弦振动方程通常被称为 一维波动方程(“一维”指空间维度,时间为另一维度)。
对于 n 维空间(如 n=2 对应平面波,n=3 对应空间波),波动方程推广为:
∂t2∂2u−a2Δu=f
其中:
- Δu 是 Laplace算子,定义为 Δu=∑i=1n∂xi2∂2u;
- n 为维数
- a 为波速(常数),f 为外力密度(非齐次项)。
高维波动方程的定解条件
初值条件: 对 n 维空间中的有界开区域 Ω⊂Rn,初始时刻(t=0)的状态由以下条件描述:
- 初始位移:
u(x,0)=φ(x1,…,xn),x=(x1,…,xn)∈Ω
- 初始速度:
ut(x,0)=ψ(x1,…,xn),x=(x1,…,xn)∈Ω
 n维波动方程示意图
n维波动方程示意图
边值条件:
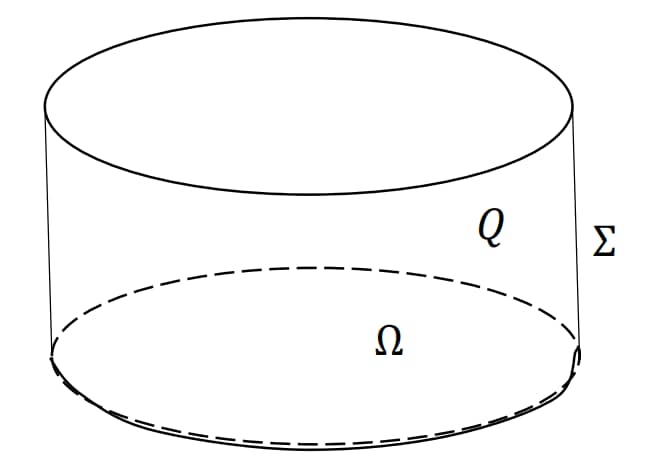
Ω⊂Rn 是有界开区域,
- Q=Ω×[0,∞):空间区域 Ω 与时间区间 [0,∞) 的笛卡尔积(柱形时空域),
- Σ=∂Ω×(0,∞):Ω 的边界 ∂Ω 与时间区间 (0,∞) 的笛卡尔积(柱形边界,不含初始时刻 t=0)。
第一边界条件(Dirichlet 型)
直接约束边界 Σ 上的 位移:
u∣Σ=g(x1,…,xn,t)
第二边界条件(Neumann 型)
约束边界 Σ 上的 法向导数(n 为 ∂Ω 的单位外法向量,∂n∂u 表示 u 沿 n 方向的偏导数):
∂n∂uΣ=g(x1,…,xn,t)
第三边界条件(Robin 型)
约束边界 Σ 上 位移与法向导数的线性组合(α>0 为常数,如弹性支撑的劲度系数):
(∂n∂u+αu)Σ=g(x1,…,xn,t)
平衡态方程
当系统处于平衡态(时间二阶导数为零,即 ∂t2∂2u=0)时,波动方程退化为 平衡态方程(稳态方程)
−a2Δu=f(x)
其中 x=(x1,…,xn)∈Ω⊂Rn,Δ 为 n 维Laplace算子,f(x) 是非齐次项。
边界条件
设空间边界为 Σ=∂Ω(因平衡态无时间变化,边界不含时间变量),三类边界条件形式如下:
第一边界条件(Dirichlet 型)
u∣Σ=g(x1,…,xn)
第二边界条件(Neumann 型)
∂n∂uΣ=g(x1,…,xn)
第三边界条件(Robin 型)
(∂n∂u+αu)Σ=g(x1,…,xn)