本文最后更新于 2025年8月2日 上午
基本概念
泛函:函数集→R/C
映射 F(f):函数→R,e.g. F(f)=∫abf(x)dx, ∀f∈C([a,b])
变分问题:求解泛函在定义域中的极值。
C0∞(Ω):在 Ω 上无穷次可微且在 Ω 的边界附近为0的函数全体。
重要函数与引理
考虑二维函数
ρ(x,y)=⎩⎨⎧ke−1−(x2+y2)1,0,x2+y2<1,x2+y2≥1.
取适当的 k,使得
∬R2ρ(x,y)dxdy=1.
定义
ρn(x,y)=n2ρ(nx,ny)(n>0),
当 (nx)2+(ny)2≥1,即 x2+y2≥n21 时,ρn(x,y)=0。
于是 ρn∈C0∞(R2),且满足
∬R2ρn(x,y)dxdy=1.
引理:
设 Ω 是 R2 上的有界单连通区域,函数 f(x,y) 在 Ω 上连续。若对任意 φ(x,y)∈C0∞(Ω),都有:
∬Ωf(x,y)φ(x,y)dxdy=0,
则 f(x,y) 在 Ω 上恒为0。
证明:反证法。
若不然,则存在 (x0,y0)∈Ω 使得 f(x0,y0)=0。不妨设 f(x0,y0)>0。
由 f 在 Ω 上连续,可知存在以 (x0,y0) 为心的 δ-闭邻域 Bδ⊂Ω,使得:
f(x,y)>0,∀(x,y)∈Bδ.
取在上面定义的光滑函数 φ(x,y)=ρn(x−x0,y−y0)∈C0∞(Ω),支集为
{(x,y)∣(x−x0)2+(y−y0)2<n21}
则当 n 足够大时,n1≤δ,故 φ 的支集完全含于 Bδ⊂Ω,即 φ∈C0∞(Ω)。
根据题设条件,对上述的 φ 有:
0=∬Ωf(x,y)φ(x,y)dxdy=∬Bδf(x,y)ρn(x−x0,y−y0)dxdy=1>0.
矛盾!最后一步是因为 ρn 在支集内的积分为 1。
□
极小曲面问题
问题设定
极小曲面问题:设 Ω⊂R2 为有界区域,边界曲线 ℓ 参数化为:
ℓ:⎩⎨⎧x=x(s)y=y(s)z=z(s)(0≤s≤s0)
求定义在 Ω 上的曲面 S:z=u(x,y),满足:
- S 以 ℓ 为周界;
- S 的表面积最小。
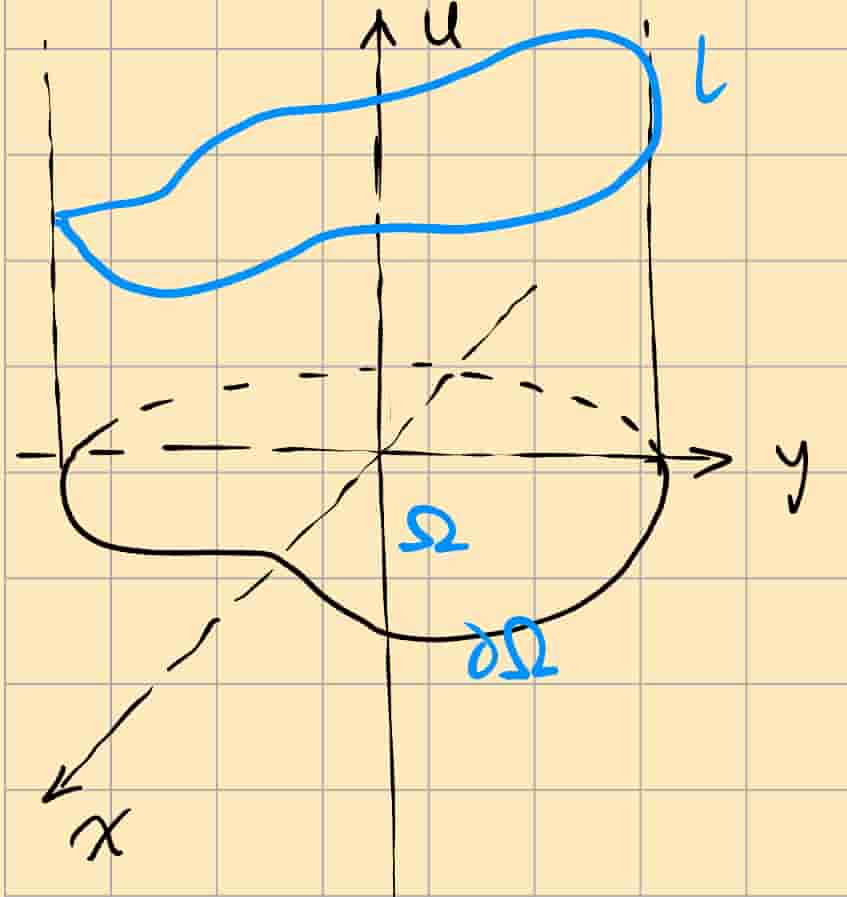 极小曲面问题示意图
极小曲面问题示意图
也即,在给定函数集合 Mφ 上,求 u∈Mφ,使得
J(u)=v∈MφminJ(v)
其中,
- 定义
Mφ={u∈C1(Ω)∣u∣∂Ω=φ}
- 定义
J(u)=∬Ω1+ux2+uy2dxdy
- 映射 J:Mφ→R 是一个泛函。
极小曲面的必要条件
必要条件:若 u∈Mφ 是上述变分问题的解,则对任意扰动,其泛函值都不减小。
定义零边界函数集 M0,
M0={v∈C1(Ω)∣v∣∂Ω=0}
对任意 v∈M0 和 ε∈R,扰动后的 u+εv 仍属于 Mφ。
定义单参数泛函:
j(ε)=J(u+εv)=∬Ω1+(ux+εvx)2+(uy+εvy)2dxdy
由于 u 是极小值点,于是,
j(0)≤j(ε),∀ε∈R
故 一阶变分为零,
j′(0)=0
接下来计算 j′(ε)
对 j(ε) 关于 ε 求导,
j′(ε)=∂ ε∂ j(ε)=∂ ε∂ J(u+εv)=∂ε∂∬Ω1+(ux+εvx)2+(uy+εvy)2dxdy=∬Ω∂ε∂1+(ux+εvx)2+(uy+εvy)2dxdy=∬Ω1+(ux+εvx)2+(uy+εvy)2(ux+εvx)vx+(uy+εvy)vydxdy
令 ε=0,得
j′(0)=∬Ω1+ux2+uy2uxvx+uyvydxdy=∬Ω1+ux2+uy2ux vx+1+ux2+uy2uy vydxdy=0,∀v∈M0
假设 u∈C2(Ω),由 Green公式(前文的性质一)且 v∣∂Ω=0,有
前半部分
∬Ω∂x∂1+ux2+uy2uxvdxdy=−∬Ω1+ux2+uy2uxvxdxdy+∫∂Ω1+ux2+uy2ux vnxdS=−∬Ω1+ux2+uy2uxvxdxdy
后半部分
∬Ω∂y∂1+ux2+uy2uyvdxdy=−∬Ω1+ux2+uy2uyvydxdy+∫∂Ω1+ux2+uy2uy vnydS=−∬Ω1+ux2+uy2uyvydxdy
于是,
j′(0)=−∬Ω∂x∂1+ux2+uy2ux+∂y∂1+ux2+uy2uyvdxdy
因 v∈M0 是 任意 零边界光滑函数,根据前文引理,得:
∂x∂1+ux2+uy2ux+∂y∂1+ux2+uy2uy=0
此即 极小曲面问题的Euler方程。
膜的平衡问题
问题设定
物理模型:考虑一处于紧张状态的薄膜,它的部分边界固定在一框架上,在另一部分边界上受到外力的作用;若整个薄膜在垂直于平衡位置的外力作用下处于平衡状态,问膜的形状如何?
取膜的水平位置为 Oxy 平面上的区域 Ω,以 u 轴垂直于 Oxy 平面,并与 x,y 轴组成右手系。Ω 的边界 ∂Ω=γ+Γ,在 γ 上已知膜的位移为 φ,在 Γ 上膜受到外力的作用,设它的垂直于膜的分量为 p(x,y)。
从力学上讲,我们可以从不同的角度来刻画这个平衡状态;例如从力的平衡原理,虚功原理等。我们在这里采用最小势能原理。
最小势能原理:受外力作用的弹性体,在满足已知边界位移约束的一切可能位移中,以达到平衡状态的位移使物体的总势能为最小。
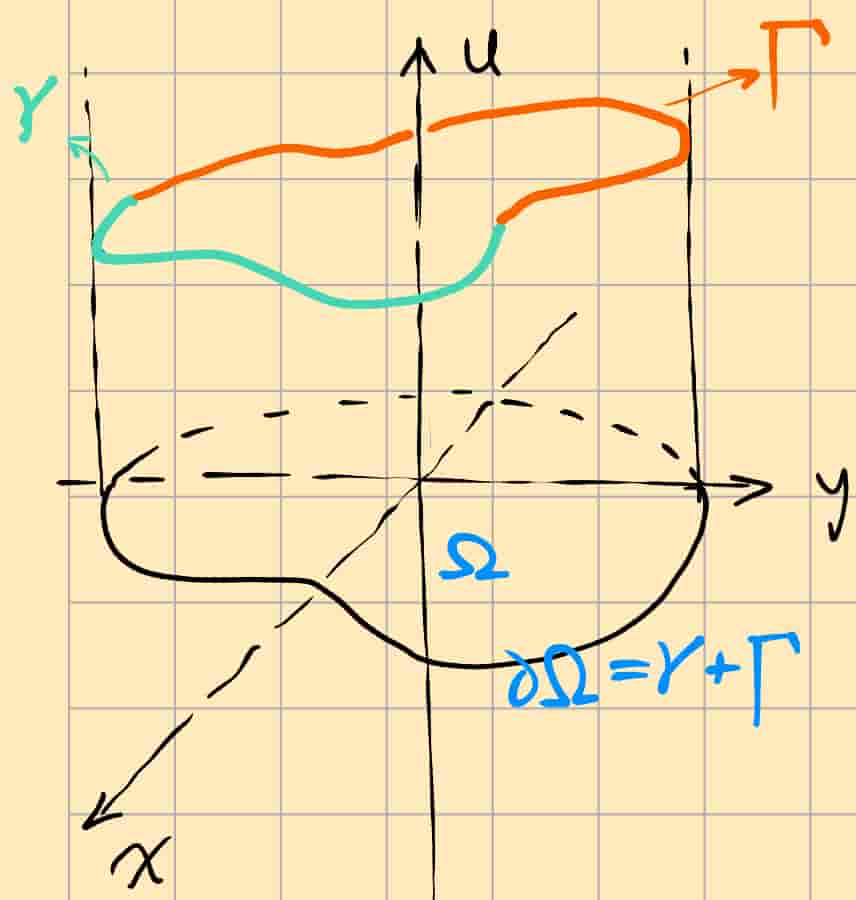 膜的平衡问题-示意图
膜的平衡问题-示意图
膜的能量泛函 J(v) 定义为应变能与外力功的差:
J(v)=应变能2T∬Ω(vx2+vy2)dxdy−面力做功∬Ωf(x,y)v(x,y)dxdy−边界力做功∫Γp(s)v(s)ds
符号说明:
- v(x,y) 表示膜上各点位移;
- 膜内的外力为 f(x,y);
- T 是膜的面内张力密度。
定义函数空间:边界 Γ 上给定位移 φ 的空间,
Mφ={v∣v∈C1(Ω), v∣Γ=φ}
求 u∈Mφ 使得 J(u) 是 J(v) 在 Mφ 上的最小值,即:
J(u)=v∈MφminJ(v)
再定义边界 Γ 上位移为 0 的空间:
M0={v∣v∈C1(Ω), v∣Γ=0}
对任意 v∈M0 和 ε∈R,有 u+εv∈Mφ。
最小势能的必要条件
定义单变量函数
j(ε)=J(u+εv)
有,
j(0)≤j(ε),∀ε∈Randj′(0)=0
j(ε) 的表达式为,
j(ε)=2T∬Ω[(ux+εvx)2+(uy+εvy)2]dxdy−∬Ωf(u+εv)dxdy−∫Γp(u+εv)ds
注意,此处之后都使用简写:
- f(u+εv):=f(x,y)[u(x,y)+εv(x,y)]
- p(u+εv):=p(s)[u(s)+εv(s)]
对 ε 求导得,
j′(ε)=T∬Ω[(ux+εvx)vx+(uy+εvy)vy]dxdy−∬Ωfvdxdy−∫Γpvds
令 ε=0,得必要条件:
j′(0)=T∬Ω(uxvx+uyvy)dxdy−∬Ωfvdxdy−∫Γpvds=0,∀ v∈M0
充分性证明:事实上,上面的必要条件是充要的。
对任意 w∈Mφ,需证 J(w)≥J(u),计算差值,
J(w)−J(u)=2T∬Ω[(wx2+wy2)−(ux2+uy2)]dxdy−∬Ωf(w−u)dxdy−∫Γp(w−u)ds
令 w−u=v∈M0,对 v 使用必要条件,有:
T∬Ω[ux(wx−ux)+uy(wy−uy)]dxdy−∬Ωf(w−u)dxdy−∫Γp(w−u)ds=0
将 J(w)−J(u) 与上式相减,得:
J(w)−J(u)=2T∬Ω((wx−ux)2+(wy−uy)2)dxdy≥0
所以上述条件也是充分的。
接下来转化为微分方程的形式
充要条件:
T∬Ω(uxvx+uyvy)dxdy−∬Ωfvdxdy−∫Γpvds=0,∀ v∈M0
Gauss-Green公式 - 性质三(详见第一讲)
∫Ω∇u⋅∇vdx=−∫ΩuΔvdx+∫∂Ωu∂n∂vdS
设 u∈C2(Ω),对充要条件应用 Gauss-Green公式的性质之三,
第一项为:
T∬Ω∇u⋅∇vdxdy=−T∬ΩvΔudxdy+T∫Γv∂n∂uds
整理得,
−∬Ω(TΔu+f)vdxdy+∫Γ(T∂n∂u−p)vds=0,∀ v∈M0(1)
由 C0∞(Ω)⊂M0,取 v∈C0∞(Ω),由 v∣Γ=0,有边界积分为 0,
∬Ω(TΔu+f)vdxdy=0
由 v 的任意性,结合 引理 得,
TΔu+f=0,∀ (x,y)∈Ω
利用上式,代回 式(1),
∫Γ(T∂n∂u−p)vds=0
再次使用 v 的任意性,结合 引理 得,
T∂n∂u=p,∀ (x,y)∈Γ
若 u∈C2(Ω)∩C1(Ω) 是变分问题的解,则满足:
⎩⎨⎧−TΔu=f,u=φ,T∂n∂u=p,in Ωon γ(位移边界)on Γ(力边界)
上述方程也称为是变分问题的 Euler方程的微分形式。